Mise
en oeuvre du bus CAN
-
Présentation
L'idée de vous présenter le bus CAN vient d'un projet personnel
que je réalise. Il s'agit d'un système domotique composé
de cartes à microcontroleur reliées entres-elles par l'intermédiaire
d'un bus : le bus CAN. Les différentes cartes peuvent-êtres de nature
diverses :
- Entrées TOR (Tout Ou Rien) optocouplées
- Sorties TOR sur relais
- Sorties TOR ou gradateurs sur relais statiques (utilisations de triacs)
- Récepteurs de télécommandes radio
- Emetteurs/Récepteurs de télécommandes IR
- Capteurs de température, d'humidité, de niveau d'eau,...
- Claviers numériques avec afficheur LCD
Toutes ces cartes étant interconnectées par le bus CAN, elles pourront
fonctionner en mode décentralisé avec un minimum de fonctionnalitées
et le mode centralisé nécessitant une centrale de gestion permettra
d'ajouter les fonctionnalités plus complexes. L'idée étant
d'assurer un minimum de fonctionnalités lorsque la centrale de gestion
est déconnectée, défaillante, ou en cours de mise à
jour.Ce système domotique devra gérer les fonctions suivantes, d'autres
fonctions viendrons par la suite.
- Eclairage
- Alarme
- Arrosage automatique
- Chauffage
- Sonorisation
- ...
- But de cette page
Le but de cette page est de vous expliquer la mise
en oeuvre du bus CAN sur les microcontroleurs PIC de chez Microchip à
l'aide des librairies écrites en language C. Etant donné le
volume d'informations sur le net ainsi que dans les livres, je ne détaillerai
pas le fonctionnement du bus CAN ainsi que celui des autres bus de terrain.
Je vous renvoie aux liens.
Cet article s'adresse à ceux qui ont des connaissances
sur la programmation en C des microcontroleurs PIC ainsi qu'une base sur le
fonctionnement des bus de terrain. Je ne saurai que vous recommander de visiter
les liens.
-
Le Bus CAN ( Controller Area Network
)
Le bus CAN est un bus de terrain crée par l'équipementier automobile
BOSCH, il est utilisé sur les véhicules pour interconnecter
les équipements et permettre l'échange de données. Il
peut utiliser plusieurs types de supports physiques pour véhiculer
les données sous forme série (simple fil, paire différentielle,
radio, fibre optique, courant porteurs, ... ). Le support principal étant
la paire différentielle en raison de son faible cout et de son immunité
aux parasites.

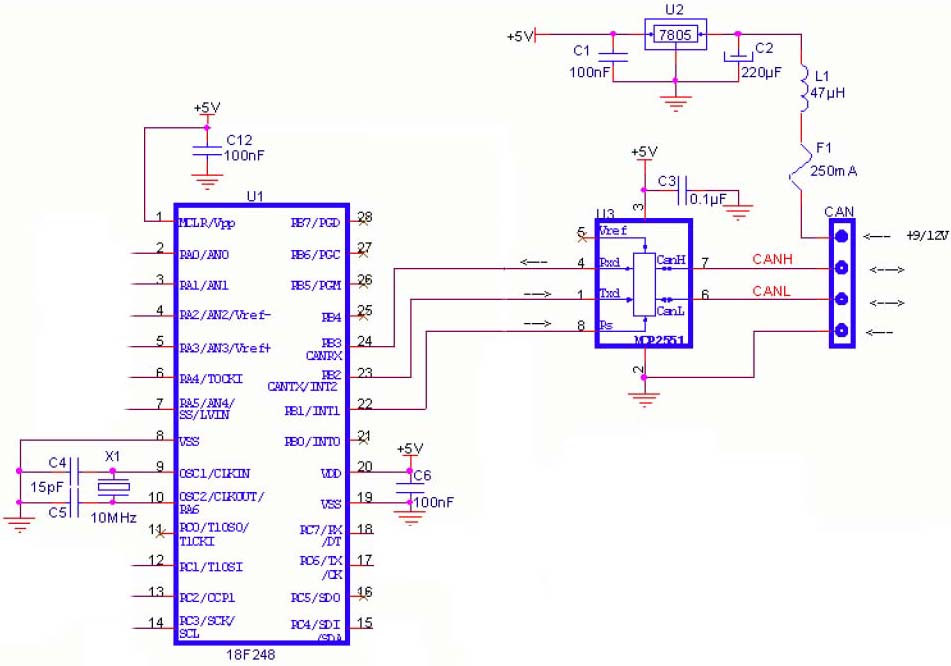
- La connection sur le bus CAN
La connection au bus CAN est réalisée à l'aide d'un transceiver
CAN et d'un controller CAN, le controleur pouvant etre intégré
dans un microcontroleur.
Comme transceiver, je peux vous donner comme exemple le MCP2551 de chez Microchip
et le PCA82C250 de chez Philips.

Le bus CAN étant un bus complexe, il est difficile de le mettre en oeuvre
de manière totalement software. Les controleurs CAN permettent de gérer
le bus de manière hardware ils intègrent les couc, avec les transceivers,
les couches 1 (physique) et 2 (liaison) du modèle OSI.
On distingue deux types de Controleurs :
Ceux externes au Microcontroleurs reliés à ce dernier par une
liaison de type SPI , comme le MCP2515.
Les Controleurs intégrés aux microcontroleurs qui disposent donc
d'un module CAN avec les lignes TXCAN et RXCAN reportés sur les pins
et destinés à êtres reliés au transceiver CAN.
- Les Microcontroleurs 8bits avec controleur
CAN intégré de chez Microchip
Il en existe plusieurs, les premiers étants les suivants :
PIC18F248, PIC18F258, PIC18F448, PIC18F458
Ceux-ci ont quelques bugs qui font qu'ils ont un fonctionnement erratique si
on ne les utilise pas d'une manière particulière(gestion de banques
de mémoire, des interruptions,...). Les "Erratas" sont disponibles
sur le site de Microchip.
J'utilise depuis peu les suivants :
PIC18F2680 et PIC18F4680
Ils sont récents, ne comportent plus les bugs précédents,
disposent de plus de mémoire et , d'un module CAN plus évolué
mais compatible avec ceux des anciennes générations. De plus,
ils sont disponibles en boitier DIP28broches et 40 broches ainsi qu'en CMS SOIC28
pour le 2680, ce qui permet de le souder convenablement à la main.
Vous avez deux méthodes de programmer les PIC pour gérer le bus
CAN :
En Assembleur, c'est ainsi que j'ai commencé, grace aux cours de bigonoff
auquels je vous renvoie si vous voulez programmer ainsi.
En C, il existe plusieurs compilateurs C, et certaines directives changent,
je ne parlerai que du C18 de Microchip que vous trouverez gratuit à l'essai.
Microchip fournit dans une de ses Application Notes (AN738) une librairie en
C pour utiliser facilement le module CAN des PIC 18Fxx8 . Les nouveaux modules
CAN (appelés ECAN) sont code compatibles avec les anciens mais possèdent
deux modes de fonctionnement (mode 1 et 2) qui ne seront donc pas utilisés
car la librairie n'a pas été écrite pour. Cepandant, l'ancien
mode de fonctionnement (mode 0) est plus facile à maitriser et on pourra
facilement un jour, migrer.
On utilisera le mode de fonctionnement "mode 0 - Legacy mode" (voir
datasheet section 23.4).
En plus du mode de fonctionnement (Functionnal Mode), il faut distinguer le
mode d'opération (Opération Mode). Attention de ne pas les confondre.
- Les modes de fonctionnement
On distingue 5 modes de fonctionnement :
Le mode normal est celui que l'on va utiliser
Permet une mise en veille ainsi qu'un réveil par interruption du PIC
lors de réception de TRAME
Les trames CAN envoyées sont directement recopiées dans le
buffer de reception sans envoi sur le bus.
Mode d'écoute seul
Au démarrage, le PIC est toujours en mode config (les pins dédiées
au CAN CANTX et CANRX peuvent etres utilisées commes entrées-sorties
standarts). C'est dans le mode config que l'on va initialiser le module CAN,
en dehors de ce mode, on ne pourra pas changer certains registres par sécurité).
Il existe 2 fonctions dans la librairie pour changer le mode d'opération
:
CANSetOperationMode et CANSetOperationModeNoWait.
Le changement de mode n'étant pas instantané (attente de la
fin de l'envoi d'une trame par exemple), la première procédure
ne rendra la main que lorsque le changement aura été effectué
tandis que la seconde fera juste une demande de changement de mode d'opération.
- L'initialisation
Le bus CAN étant assez complexe, son initialisation est assez complexe.
Il existe une procédure pour initialiser le module CAN : CANInitialize
Il vous vaudra cepandant savoir quoi fournir commes paramètres
La figure vous présente la composition d'un "Nominal Bit Time",
il s'agit de l'inverse du débit choisi du bus CAN. Le module CAN dispose
d'une unité élémentaire de temps : le Time Quantum. Sa
valeur est déterminée par BRP et dépend de la vitesse
du quartz. Voici la formule : Time Quantum = (2 * BRP )/Fosc
Le Nominal Bit Time est composé d'un segment de synchronisation qui
va permettre aux différents noeuds CAN de se synchroniser sur l'emetteur.
Il correspond à SJW (Synchronized Jump Width bits), vous pourrez choisir
une valeur de 1 à 4 quantum de temps. La valeur typique étant
1.
Le Segment de propagation sert à tenir compte des temps de propagation
sur le bus. Sa valeur peut être comprise entre 1 et 8 quantums de temps.
Il est matérialisé par PROPSEG.
Calcul du temps de propagation :
C'est le temps que va mettre le signal électrique pour faire un aller
et retour entre deux noeuds CAN les plus éloignés du bus. Soit
:
T segment de propagation = 2 * ( T propagation sur bus + T retard Comparateurs
+ T retard drivers de ligne CAN)
Les deux autres segments qui composent un Nominal Bit Time sont les segments
buffers phase 1 et phase 2. Ils servent essentiellement à compenser
les erreurs de phase détectées lors des transitions. Ils vont
déterminer la position du "Sample Point" pour la mesure.
L'ensemble de tous ces segments de propagation doit donner le temps de bit
nominal qui vous donnera alors le bitrate.

- L'émission
Voir AN738 page 12 pour la description de la méthode d'envoi de trames
CAN
L'émission d'une trame CAN est réalisée à l'aide
de la commande : CANSendMessage
Les PICs disposent de 3 buffers d'émission, cette méthode va
chercher 1 buffer libre pour émettre. Si elle n'en trouve pas, elle
retournera la valeur false.
Noter que si vous envoyer 3 trames et qu'elles ne sont pas acquittées
(c'est à dire qu'elles n'ont pas étés reçues par
d'autres cartes) les 3 buffers vont rester pleins et vous ne pourrez plus
envoyer.
La réception
La réception est plus complexe que l'émission, on
dispose de deux buffers de réceptions ainsi que des filtres et masques
pour chaque buffer. La configuration des filtres et masques va vous permettre
de rediriger le type de trame selon son identifiant vers le buffer 1 ou le buffer
2.  Le
masque vous permet de sélectionner ce que vous voulez filtrer dans l'id.
Bit à bit cela donne : Si le masque est à 0, on accepte quelque
soit la valeur du filtre.Si le masque est à 1, on accepte que si le bit
du filtre est identique au bit de la trame reçue.Voir AN738 page 10 et
11 pour les méthodes permettant de définir filtres et masques.
Le
masque vous permet de sélectionner ce que vous voulez filtrer dans l'id.
Bit à bit cela donne : Si le masque est à 0, on accepte quelque
soit la valeur du filtre.Si le masque est à 1, on accepte que si le bit
du filtre est identique au bit de la trame reçue.Voir AN738 page 10 et
11 pour les méthodes permettant de définir filtres et masques.
Le masque 1 et les filtres 1 et 2 correspondent au buffer 1. Le
masque 2 et les filtres 3,4,5 et 6 correspondent au buffer 2.
La fonction CANReceiveMessage vous permet de récupérer
le message CAN recu ainsi que de savoir par quel filtre il est passé,
vous pourrez alors savoir de quel buffer il provient.
Il y a une erreur en haut de la page 14, la fonction ne retourne
pas rien "void" mais retourne un booléen "BOOL" qui
vaudra false s'il n'y a pas de nouveaux messages.
Noter la présence d'une fonction CANIsRxReady() qui permet
de savoir si au moins une trame a été reçu.
La gestion des erreurs
La gestion des erreurs est un des points les plus complexes du
bus CAN. Plusieurs types d'erreurs peuvent avoir lieu. Les controleurs CAN disposent
de deux compteurs d'erreurs : Un pour les erreurs d'émission, et un pour
les erreurs de réception. Ces compteurs ne sont pas de simples compteurs
d'erreurs, ils vont s'incrémenter et de décrémenter automatiquement
lors de l'émission/réception.
A partir de ces compteurs, le controleur CAN va passer dans différents
modes de fonctionnement.actif, passif, et Off. Lorsqu'un noeud CAN a eu plus
de 255 erreurs d'émission, il va passer en mode Bus Off, c'est à
dire qu'il ne tentera plus d'émettre.
 De
0 à 127 : Etat "error active". Le noeud CAN en question continuera
d'émettre et de reçevoir normalement mais il indiquera son status
d'"error active" aux autres noeuds si une autre erreur est détectée.
De
0 à 127 : Etat "error active". Le noeud CAN en question continuera
d'émettre et de reçevoir normalement mais il indiquera son status
d'"error active" aux autres noeuds si une autre erreur est détectée.
De 128 à 255 : Etat de "error passive". Le noeud
CAN continuera d'émettre et de reçevoir mais il indiquera son
status d'error passive à chaque trame d'erreur.
Plus de 255 : Etat de "Bus Off". Lassé de ne
pouvoir émettre ou reçevoir, il va se mettre à bouder dans
un coin afin de ne pas perturber le bon fonctionnement du bus.
Vous avez trois méthodes pour vérifier si le bus
est off ou en état d'erreur passive :
CANIsBusTxPassive(), CANIsBusRxPassive(), et CANIsBusOff().
Comme vous pouvez le constater, la gestion des erreurs est très
complexe! Il ne s'agit que d'une infime partie. Je ne connais d'ailleurs pas
tout.
L'intéret de ce bus est que tout ce mécanisme de
traitement des erreurs est géré automatiquement de manière
hardware. On a donc juste à surveiller les erreurs dans le programme
histoire de gérer les défauts comme mettre le système en
sécurité.
La gestion des réceptions
Il existe deux méthodes pour gérer les réceptions
de trames CAN, soit en testant en permanence l'état des buffers de réception
par la commande CANIsRxReady() par exemple, soit en utilisant les interruptions.
L'avantage des interruptions de traiter très rapidement
les trames recues avant l'arrivée d'une nouvelle. On peut par exemple
se contenter dans la routine de réception de stocker les trames reçues
dans un buffer puis de traiter ces trames dans le programme principal.
Les liens